



Featured News
Garrett Motion’s Breakthrough Oil-Free Centrifugal Compressor Enhances High-Efficiency Liquid Cooling Solutions
With the growth of BESS, liquid cooling is critical for ensuring high performance and reliability. Garrett’s solutions strengthen TONFY’s liquid cooling platform for energy storage and create a foundation for future collaboration in high-efficiency infrastructure.

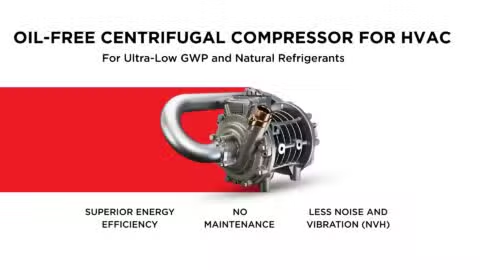
Garrett Motion Showcases Breakthrough Oil-Free Centrifugal Compressor Portfolio at China Refrigeration Expo 2026
Garrett is launching a comprehensive portfolio of oil-free centrifugal compressors covering cooling demands from 7 to 500 tons (25 to 1,750 kWc), enabling scalable, high-efficiency cooling architectures. The platform combines high-speed centrifugal turbomachinery, oil-free foil bearings and model-based control algorithms, outperforming traditional scroll and screw designs.

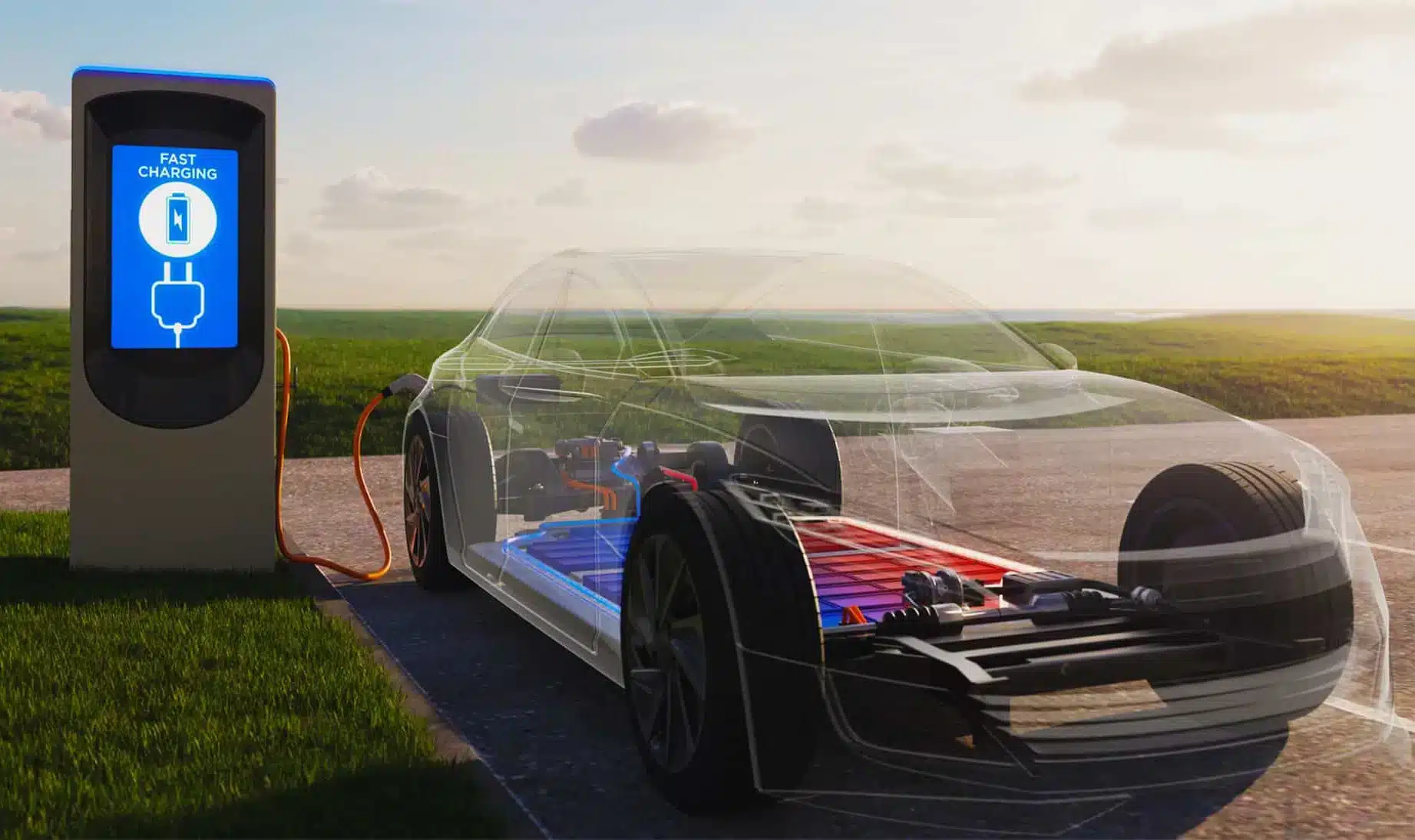
Garrett Motion’s E-Cooling Compressor is Redefining Thermal Management Efficiency & Power for Electric Buses and Trucks in China
Truck and Bus HVAC integration leader Cling has awarded Garrett volume production of its breakthrough oil-free, foil bearing centrifugal compressor, with start of production in 2027.

Garrett Motion Introduces Garrett Original MAXLIFE: A New Aftermarket Turbocharger line for Ageing Vehicles
With the launch of Garrett Original MAXLIFE, Garrett is directly addressing the needs of this customer sector by offering the first turbocharger solution that delivers OEM-certified quality and performance, combined with value for money. Customers now have a trusted alternative to low-cost options.

Trane Technologies and Garrett Motion Collaborate to Advance Ultra High Efficiency Commercial HVAC Solutions
The collaboration establishes a framework for shared engineering, design and field testing activities across global markets. It also includes joint exploration of future applications, including high-speed centrifugal technologies for smaller capacity HVAC systems, distributed cooling and other emerging cooling needs.
Garrett Motion Rings Nasdaq Bell to Mark 70 Years of Innovation
Garrett Motion celebrated its 70th anniversary today with a powerful moment in Times Square — President and CEO Olivier Rabiller rang the Nasdaq Opening Bell as Garrett’s name lit up the Nasdaq Tower.
More than a celebration, it marks a defining milestone in Garrett’s journey — a tribute to its legacy of innovation and a symbol of its future: pushing the boundaries of technology to serve a world in motion.

Garrett News Hub





Webinar: Leveraging High-Speed Electric Motor Technology, for Differentiated Commercial Vehicle Beam Axles
Mr. Bouaita will speak on the strategic opportunities in Commercial Vehicle electrification and how Garrett’s innovative 2-in-1 motor inverter design is achieving significant advancements in the pursuit of more powerful, reliable and scalable solutions for electric and commercial vehicle propulsion.


Garrett Showcases Electrification and Turbocharging Innovations at the Vienna Motor Symposium
Garrett presents its diff…

Garrett-Powered Drivers Set Records and Capture Wins at GRIDLIFE Road Atlanta
Garrett-powered teams made their mark at GRIDLIFE Road Atlanta with record-setting laps, class victories, and podium finishes. Dewey DeWitt reset the Street Mod record, Chris Boersma established a new Track Mod FWD record, Jimmy Rauck recorded a personal best, and Mike Dusold captured the Unlimited class win, showcasing the performance of Garrett G-Series turbochargers across multiple competitive time attack classes.

Garrett PowerMax™ Turbo Upgrade Adds 233 WHP to Bronco Raptor
Full-Race Motorsports tested a Ford Bronco Raptor equipped with Garrett PowerMax™ turbochargers and recorded 568 WHP and 591 WTQ on E50 fuel. The result: gains of 233 wheel horsepower and 174 wheel torque over stock while maintaining direct-fit installation and OEM-quality engineering.

200+ MPH Record Pass: Garrett G-XRace Powers First 200 MPH K-Series
The Garrett G-XRace GXR45-73 turbo powers record-breaking 200+ mph runs, delivering 70 psi capability, strong back-half performance, and proven reliability in extreme drag racing conditions.

Power Unleashed: Skoda Superb Build with Garrett PowerMax
See how a Garrett PowerMax turbo transforms a Skoda Superb with improved horsepower, faster response, and direct-fit performance built for the 2.0L TSI platform.






Technology Highlights
Garrett E-Turbo: Ready Today to Meet & Exceed the Industry’s Electric Boosting Needs
Garrett’s award-winning E...




